バイオミメティクス(生物模倣)は、生物の構造や機能、生産プロセスなどから着想を得て、新しい技術の開発やものづくりに活かそうとする科学技術であり、古くより合成繊維や電気回路の発明をもたらしてきた。今世紀になって、世界的なナノテクノロジーの展開と相まって、ロータス(蓮の葉)効果やゲッコテープなどの新しい材料が開発され、生物学・博物学と材料科学や工学の緊密な学際融合に基づいた新しい学問体系を生み出すとともに、材料設計や生産技術の新規開発とそれに基つく省エネルギー・省資源型モノつくりなど、持続可能性社会実現への技術革新をもたらすものとして注目されている。
「バイオミメティクス」および「バイオミミクリー」という用語は、古代ギリシャ語に由来している:βίος(bios)、life、μίμησις(mīmēsis)、模倣、μιμεῖσθαι(mīmeisthai)から、模倣する、μῖμος(mimos)、演じる。を語源として、「バイオミメティクス」は1950年代にアメリカ合衆国の神経生理学者オットー・シュミット(Otto Herbert Schmitt)が用語を作り出し、初めて使用した。「バイオミミクリー」は1997年に「自然と生体に学ぶバイオミミクリー」という本を出版したサイエンスライターのジャニン・ベニュス(Janine Benyus)によって提唱された。
Janine Benyus – Biomimicry Institute
生物は、自然淘汰によって生命誕生以来の長い時間にわたって最も適応した構造と材料を進化させてきたはずである。という考えから自然界のモデル、システム、要素を模倣する。バイオミメティクスは、マクロおよびナノスケールの生物学的ソリューションに触発された新しい技術を生み出した。人間は、その存在を通して問題に対する答えを求めて自然を見てきた。自然は、自己修復能力、環境暴露耐性と耐性、疎水性、自己組織化、太陽エネルギーの利用などの工学的問題を解決してきた。
出典:Biomimetics - Wikipedia
バイオミメティクスの手法を用いて作られている生物模倣ドローン
昆虫や鳥類、翅果を持つ植物など生物の飛行を参考にし、飛行するよく知られた従来型のマルチコプターではないドローンが研究、開発、商品化されている。
ツバメ型 超軽量飛翔体「BionicSwift」
BionicSwift | Festo JP
群れでの安全な飛行アクロバット
BionicSwifts は敏捷かつ機敏でループやタイトなターンを飛行することも可能です。無線に基づいた屋内 GPS との連携プレーにより5羽の人工ツバメは定義された空域で協調的かつ自律的に移動可能です。
自然モデルに基づく超軽量飛翔体
ロボットバードの設計の際にはその生物学的なモデルでも同じだったように、軽量構造の使用に焦点が当てられました。技術においても、自然界と同様、次のことが当てはまります:移動する重量が少なければ少ないほど、マテリアルとエネルギー消費のコストは低減します。したがって、体長44.5センチ、翼幅68センチのこのBionicバードの体重はわずか42グラムです。
効率的な飛行運転のためのエアロダイナミクスを鑑みた羽毛
できるだけ自然のモデルに忠実に飛び操舵を行うために、翼は鳥の羽をモデルにしています。個々のベーンは超軽量で柔軟ですが非常に頑丈なフォームでできており、シングルのように互いに重なり合っています。カーボン製の羽根軸で連結されたこれらのベーンは自然界のモデル同様に、実際の手や腕の羽に取り付けられています。
翼がアップストロークで羽ばたくと、個々のベーンが扇状に広がり、空気が翼を通って流れることが可能になります。このため鳥が翼を上に引き上げるに必要な力はそんなに大きくないことを意味します。ダウンストロークの羽ばたきの際にはベーンが閉じるため飛行ロボットはより強力に飛ぶことができます。自然に近い形で複製されたこの翼によりBionicSwifts は以前の羽ばたき翼駆動と比較しても、より優れた飛行特性を備えています。
集団行動する蝶型超軽量飛翔体「eMotionButterflies」
eMotionButterflies | Festo JP
集団行動の超軽量飛翔体
Bionic Learning Networkにおいて、飛行は繰り返し語られるテーマです。Festoは BionicOpter と eMotionSpheres のプロジェクトから得た知見を、バイオニクスの蝶の開発に注ぎ込みました。これらの蝶では人工昆虫の超軽量構造と、集団での協調的な飛行行動が組み合わされています。
トンボ型ロボット「BionicOpter」
BionicOpter | Festo JP
トンボの飛行から得たインスピレーション
軽量構造と機能統合により実現しました:Bionic Learning Networkを使用して、FestoのBionicsチームはトンボの非常に複雑な飛行特性を技術的に実装しました。自然界のモデルと同様に、超軽量のこの飛翔物体はあらゆる空間方向に操縦でき、空中で静止したり、翼を羽ばたかせることなく航行したりすることができます。これに、ヘリコプター, モータ式航空機, グライダーを組み合わせたよりも多くの飛行条件に対応できるモデルが初めて登場しました。
カモメ型ロボット「SmartBird」
SmartBird | Festo JP
鳥の飛行を解明
セグロカモメのインスピレーション:自然界のモデルと同様、Smart Bird も翼を羽ばたかせるだけで飛行します。この超軽量のオーニソプターは優れたエアロダイナミクスを備えており、類似の飛行モデルとは対照的に、追加の駆動力を一切必要とせずに単独で離陸、飛行、着陸することができます。
コウモリ型自立飛行ロボット「BionicFlyingFox」
BionicFlyingFox | Festo JP
インテリジェントなキネマティクスを持つ超軽量飛翔体
BionicFlyingFox ではFestoのBionic Learning Network開発者がオオコウモリをじっくりと観察しオオコウモリの特殊な飛行動作を技術的に実装しました。統合されたオンボードの電子機器と外部の Motion-Tracking-System との相互作用によりこの超軽量の飛行物体は定義された空域内を半自律的に移動することができます。オオコウモリ(英語では"flying fox")はコウモリの仲間で能動的に飛ぶことができる唯一の哺乳類です。特に目立つ特徴は細長く弾力性のある飛行膜です。これは細長い中手骨と指の骨から足首までずっと伸びています。飛行中、オオコウモリは指で飛行膜の曲率を制御しエアロダイナミクスを利用して空中を機敏に移動します。これにより低速飛行で操舵しても最大限の揚力が得られます。
自然界のモデルにならった、敏捷なキネマティクス
翼幅228cm、体長87cm の人工オオコウモリは重さ580グラムです。自然界のオオコウモリと同様に、翼のキネマティクスは腕と手の翼に分かれています。翼には弾性ある皮膚が張られており、この皮膚は足までを覆っています。これにより翼面積は比較的大きく、翼面荷重を低く抑えることができるようになっています。生物学のモデルと同様に、関節のすべてのポイントが1つのレベルにあるためBionicFlyingFox は翼を個別に制御し折りたたむことができます。
特別に開発された飛行膜
モデルの飛行膜は非常に薄く、超軽量であると同時に堅牢です。この飛行膜は2枚の気密フォイルとエラスタン編地を約45,000箇所で溶接したものです。その伸縮性により翼を縮ませたり揺すぶったりしても、ほとんどシワにはなりません。編地のハニカム構造は飛行膜に小さな裂け目ができても、これがさらに大きくなるのを防ぎます。これは組織が少々損傷しても、BionicFlyingFox は飛行を続けることができることを意味します。
それは、模倣するようにデザインされた動物と同じように、急降下し、フラップし、潜ります。コウモリとその翼の柔軟性と敏捷性に触発されて、エンジニアのチームは、同じスキルを持つ自律飛行ロボットを思いつきました。
コウモリ型自立飛行ロボット「Bat Bot (B2)」
Watch a new robot fly just like a bat | Science | AAAS
2017/02/01空中ロボットはこれまで昆虫や鳥からインスピレーションを得てきましたが、コウモリは複雑な骨格と不規則な飛行パターンのためにロボット学者にとってより困難な課題です。「コウモリは鳥や昆虫に比べて非常に複雑な体型を持っています。彼らの翼は非常に関節がはっきりしていて、多くの関節があります」と、イリノイ大学アーバナ・シャンペーン校のチームメンバー、アリレザ・ラメザニは言います。
コウモリの翼には、飛行中に形状を調整するための40以上の関節がありますが、この関節を関節ごとに再現すると、ロボットはかさばりすぎます。
代わりに、バットボットは、それが方向の範囲で各翼を動かすことを可能にする9関節の翼構造を持っています。ジョイントは軽量カーボンファイバー製で、各翼を覆う伸縮性のあるコウモリの皮膚を模倣した超薄型のシリコン膜が付いています。
このメンブレンにより、バットボットは翼面を張り詰めたまま翼の形状を変えることができ、これはコウモリならではの能力です。コウモリの皮の特性に匹敵する素材は他にありません、とRamezaniは言います。「骨格を他の伸縮性のある材料で覆うと、それは固定され、変形したり形を変えたりすることはできません。
完成したロボットの重量は93グラムで、バックボーンの小さなモーターを使用して制御されます。また、関節の角度を測定するオンボードセンサーも備えており、外出先での翼の位置調整に役立ちます。本物のコウモリは、皮膚全体に感覚器官のネットワークを持っており、研究者は翼の上の空気の流れに関する情報を提供すると考えています。テストでは、バットボットは、コウモリが獲物を追いかけるときと同じように、バンクターンと急なダイビング操作を行いました。
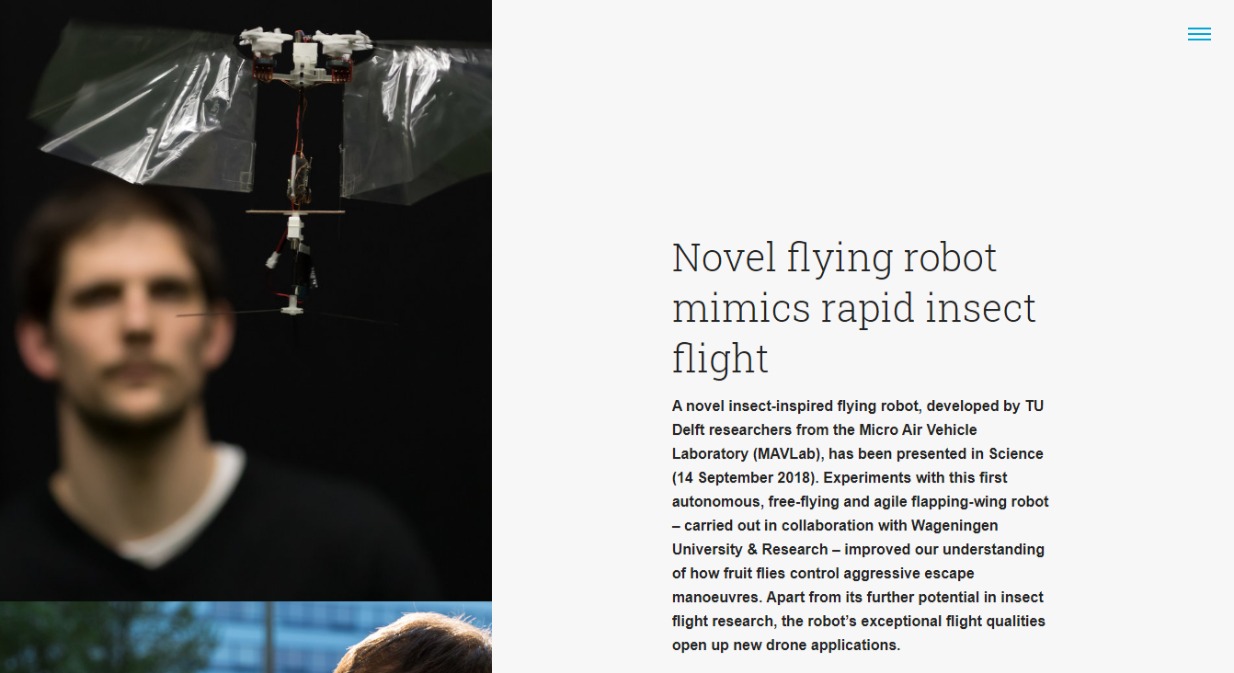
小型飛行ロボット「DelFly Nimble」
Novel flying robot mimics rapid insect flight2018/09/14
斬新な高機敏飛行ロボット
MAVLabのデルフト工科大学の研究者は、昆虫に触発された新しい飛行ロボットを開発しました。これまでのところ、その性能は比類のないものですが、シンプルで生産しやすいデザインです。飛行昆虫のように、ロボットの羽ばたき翼は毎秒17回鼓動し、空中にとどまるために必要な揚力を生成するだけでなく、翼の動きを少し調整して飛行を制御します。ショウジョウバエに触発されて、ロボットの制御メカニズムは非常に効果的であることが証明されており、その場でホバリングして任意の方向に飛ぶだけでなく、非常に機敏であることが証明されています。
「ロボットの最高速度は25 km/hで、ループやバレルロールに似た360度のフリップなどの積極的な操縦を実行することさえできます」と、この研究の筆頭著者でロボットのメインデザイナーであるMatěj Karásekは述べています。「さらに、33cmの翼幅と29グラムのロボットは、そのサイズのために優れた電力効率を持ち、5分間のホバリング飛行または完全に充電されたバッテリーでの1 km以上の飛行範囲を可能にします。
水中・空中ハイブリッドロボット「New RoboBee」
New RoboBee flies, dives, swims and explodes out the of water 2017 /10/25
新しいハイブリッドRoboBeeは、飛んだり、水に飛び込んだり、泳いだり、水から飛び出したり、安全に着陸したりできます。RoboBeeは、4つの浮力と中央のガス収集室で改装されています。RoboBeeが水面まで泳ぐと、チャンバー内の電解プレートが水を可燃性ガス燃料である酸水素に変換します。
「私たちは、車両が水から空気に直接移行することを可能にする新しいメカニズムを設計しましたが、これは昆虫の世界で自然が達成できることを超えています。
水中を出入りするミリサイズのロボットを設計するには、多くの課題があります。第一に、水は空気の1,000倍の密度であるため、翼の羽ばたき速度は2つの媒体間で大きく異なる必要があります。羽ばたき周波数が低すぎると、RoboBeeは飛行できません。高すぎると、翼が水中でカチッと外れます。
理論的なモデリングと実験データを組み合わせることで、研究者らは、翼の大きさと羽ばたき速度のゴルディロックスの組み合わせを発見し、ミツバチが空気と水の両方で繰り返し動作できるように設計をスケーリングしました。このマルチモーダル機関車戦略を使用して、ロボットは空中で220〜300ヘルツ、水中で9〜13ヘルツで翼をフラップします。
チームが取り組まなければならなかったもう一つの大きな課題は、ミリメートルスケールでは、水面はレンガの壁であるかもしれないということです。表面張力はRoboBeeの重量の10倍以上、最大揚力の3倍です。以前の研究では、衝撃と鋭いエッジがRoboBeeの水への侵入の表面張力をどのように壊すことができるかが示されていましたが、疑問は残っていました:それはどのように再び戻ってくるのですか?
RoboBeeは、私たちが人間規模で経験することに慣れているものとは力が異なるプラットフォームを表しています。
この問題を解決するために、研究者らはRoboBeeを4つの浮力アウトリガー(本質的にはロボットフロート)と中央ガス収集室で改造しました。RoboBeeが水面まで泳ぐと、チャンバー内の電解プレートが水を可燃性ガス燃料である酸水素に変換します。
「RoboBeeのペイロード容量は限られているため、独自の燃料を運ぶことができないため、環境から資源を利用するための創造的なソリューションを考え出す必要がありました」と、Microrobotics Labの大学院生で論文の共著者であるElizabeth Farrell Helbling氏は述べています。「表面張力は、水から出るために克服しなければならないものですが、ガス収集プロセス中に利用できるツールでもあります。
ハーバード大学が開発する昆虫サイズのロボット「RoboBee」
RoboBees: Autonomous Flying Microrobots
ミツバチの生物学に触発されて、Wyss Instituteの研究者は、農業や災害救援で無数の役割を果たすことができる人工システムであるRoboBeesを開発しています。RoboBeeはペーパークリップの約半分の大きさで、重量は10分の1グラム以下で、電圧がかかると収縮する材料の「人工筋肉」を使って飛びます。追加の変更により、RoboBeeの一部のモデルは、水中での水泳から飛行に移行し、静電気を使用して表面に「とまり木」を当てることができます。
RoboBeeの首謀者は、自己完結型で自律的な飛行と大規模なグループでの協調行動を達成することができる自律型マイクロ航空機を開発するという考えによって動機付けられました。そのために、RoboBeeの開発は大きく分けて、ボディ、ブレイン、コロニーの3つに分かれています。身体開発は、コンパクトでシームレスに統合された電源の助けを借りて、自分で飛ぶことができるロボット昆虫を構築することからなる。脳の発達は、ミツバチの目とアンテナを模倣し、環境を感知して動的に反応することができる「スマート」センサーと制御エレクトロニクスに関係しています。コロニーの焦点は、多くの独立したロボットの行動を調整して、効果的なユニットとして機能することです。
ハチドリロボット「Hummingbird robot」
Hummingbird robot using AI to go soon where drones can’t - Purdue University News2019 /05/09
ドローンが行けないところにすぐに行くハチドリロボット
パデュー大学の研究者は、鳥が毎日自然に使用するさまざまな技術に基づいて機械学習アルゴリズムによって訓練された、ハチドリのように振る舞う飛行ロボットを設計しました。
ロボットは3Dプリントされたボディ、炭素繊維で作られた翼、レーザーカット膜を備えています。研究者らは、平均的な成虫の壮大なハチドリの体重である12グラムのハチドリロボットと、体重1グラムの昆虫サイズのロボットをもう1台作りました。ハチドリロボットは、自重以上、最大27グラムまで持ち上げることができます。
より高い揚力でロボットを設計することで、研究者は最終的にカメラやGPSなどのバッテリーとセンシング技術を追加する余地が広がります。現在、ロボットは飛行中にエネルギー源に縛られる必要がありますが、それはそれほど長くは続かないだろう、と研究者は言います。
ロボットは本物のハチドリのように静かに飛ぶことができ、秘密の操作に理想的です。そして、彼らは乱気流を通して安定しており、研究者は石油タンク内の動的にスケーリングされた翼をテストすることによって実証しました。
ロボットは2つのモーターしか必要とせず、各翼を他の翼から独立して制御することができ、飛行動物が自然界で非常に機敏な操縦を行う方法です。
リアル鳥型ドローン「MetaFly-メタフライ-」
bionicbird 公式ONLINE 2020/09/16
【軽量・小型設計】重さはわずか約10g。軽量・小型設計で慣れれば屋内でも遊べます。
■【耐衝撃性◎】頭部、脚部、翼部は弾性があり着地の衝撃にも耐える設計です。
■【サイズ&仕様】翼長 :29cm本体長さ :19cm、コントローラー長さ :10cm 幅:15cm, 無線周波数2.4GHz ・自動電源オフ機能 ・最大無線通信距離:150m ・単三電池×4
鳥型ドローン「MetaBird-メタバード-」
2021/12/1
自然の生物の機能を模したバイオミティクス(生物模倣)と呼ばれる考え方に基づき開発され、柔軟性のあるプラスチックを使った本体はたった9.5g=100円玉たった2枚分しかありません。
約150m範囲で通信可能でアルミラジエーターを備えたメインモーターは、機械的なノイズがほとんど聞こえず飛んでいる姿は本物の鳥と全く同じように見えます。
■誰でも簡単にインストールから操作までが可能!
スマートフォンに専用アプリ「BIONICBIRD」をインストールして、そのアプリでMetaBirdを操作することができます。iOSとAndroid、どちらにも対応しています。
<サイズ&仕様>
■総重量(梱包時) 約130g ■梱包サイズ 20cm×12cm×3cm
■本体重量 約9.5g ■自律飛行時間 約10分間
■充電方法 USB接続 ■充電時間 約12分間
■飛行距離 約150m ■飛行スピード 時速5~20kmに調整可能
メープルシード型モノコプター「Samarai」
Lockheed Martin's Samarai monocopter - you won't believe how this thing flies
2011/08/19
プロペラのような形のカエデの種は回転しながら落下することで、遠くまで移動することができる。ロッキード・マーティン社はこのデザインを取り入れて、シングルロータードローン”サマライ”を開発した。そのシンプルな機体には可動部分が2ヶ所しかなく、容易に小型化することができた。このプロジェクトを引き継いだのが米国防高等研究計画局(DARPA)で、狭い空間向けの偵察ドローン開発を行っている。ロッキード・マーティンは、現在飛行試験中のモノコプター型無人航空機「サマライ」の最新小型版を紹介するビデオを公開しました。翼長30cm、翼の先端にプロペラを搭載し、どんな地面からでも垂直に離着陸することができます。屋外から屋内への飛行を想定しており、玄関や窓を通過できる大きさです。
「私たちはメープルシードの形とデザインを取り入れ、インテリジェントな飛行制御とアビオニクスでそれを利用しました」とロッキードのインテリジェントロボティクス研究所のディレクター、ビル・ボルジアは同社のウェブサイトで述べています。「デザインは信じられないほどシンプルで、サマライは少量でも非常に手頃な価格です。サマライは諜報と偵察任務のために設計されており、ペイロードを提供することもできます。これは、わずか2つの可動部品と16インチの長さと半ポンド未満の重量で機械的にシンプルであり、オペレータがバックパックに入れて車両を簡単に運び、地面から、またはブーメランのように発射する信頼性があります。
これは、単一のフォームを作成するために、プラスチックの連続した小さな層を「印刷」することによって製造されました。プリンタは高価な生産コストを排除し、ロッキードマーティンはコストを抑えてカスタマイズすることができ、エンジニアは特定のミッションに合わせたサマライを迅速かつ手頃な価格で生産することができます。
Video: Lockheed's Amazing Monocopter Drone Takes Flight | Popular Science2009/09/29
ロッキードの驚くべきモノコプタードローンが飛行する
メープルシードポッドをベースにしたドローンは、兵士のためのポータブルスカウトとして機能する可能性があります
ロッキード・マーティンのサマライ・システムは、木々から飛び散るサマーラの苗木にちなんで名付けられました。当初の計画では、安定したストリーミングビデオを何とか送り返し、2グラムのペイロードを配信できるシードポッドサイズのドローンが必要でした。このシステムの資金は、フェーズ1のDARPA契約後に撤退したと思われていましたが、30インチの翼幅を持つより大きなテストプロトタイプが最近登場した。
メープルシード型モノコプター「F-SAM(Foldable Single Actuator Monocopter)」
Flexible Monocopter Drone Can Be Completely Rolled Up - IEEE Spectrum2021/11/18
空飛ぶロボットを作るのに、それほど多くのハードウェアは必要ないことがわかりました。空飛ぶロボットは、通常、2枚の翼や4つのモーターなど、とんでもなく大げさな部品で構成されています。このようなものは、資金が有り余っている人には有効かもしれませんが、合理的な予算に収めようとする人には、たった1枚の翼と固定ピッチのプロペラがあれば、飛行ロボットを作ることができるのです。そして、その翼を柔軟にすれば、全体を折り畳んで、空飛ぶロボットのようなスイスロールにすることも可能です。
このタイプのドローンはモノコプターと呼ばれ、そのデザインは、カエデの木から回転しながら落ちてくる単翼の種鞘であるサマラの種を非常によく模しています。回転することで地面への落下速度が遅くなり、木から遠くまで種を飛ばすことができます。これは、ドローンが持つべき素晴らしい機能で、万が一、すべての機能が停止しても、デフォルトで静かに回転して着陸します。
私たちがここで見ているF-SAMと呼ばれるモノコプターは、シンガポール工科デザイン大学のもので、私たちは過去に、この変形可能なホバリングロータークラフトなど、彼らの飛行ロボットについて記事を書いたことがあります。F-SAMは、Foldable Single Actuator Monocopterの略で、ご想像の通り、折りたたみ可能で、たった1つのアクチュエーターで操縦するモノコプターです。
ハードウェア的にはあまり大したことはないのですが、それがこのデザインの魅力のひとつです。アクチュエーターが1つあれば、完全な方向制御が可能です。スロットルを大きくすれば、機体の回転数が上がり、高度が上がりますが、これは非常に簡単なことです。方向制御はもっと難しいのですが、それほど難しくなく、機体が回転している間に、行きたい方向に向けてモーターを繰り返しパルスさせる必要があります。F-SAMは、精密な自律性の可能性を探るために、ビデオの中ではモーションキャプチャ環境で動作していますが、その環境に限定されることはなく、制御のために外部からのセンシングを必要としません。
F-SAMの制御基板はカスタム設計で、翼は多少の加工が必要ですが、その他の部品は市販の安価なものを使用しています。F-SAMの総重量はわずか69gで、そのうち40%近くがバッテリーで、約16分の飛行時間を実現しています。よく見ると、小さなカーボンファイバーの足があり、これが支柱を地面から浮かせ、地面と接触することなく地上離陸の動作を可能にしていることがわかります。
IEEE Spectrum:柔軟な翼の構造について、さまざまな材料や材料の組み合わせを検討されたようですね。なぜ、バルサ材とプラスチックの組み合わせになったのですか?
Shane Kyi Hla Win:モノコプターの翼構造には、飛行中の制御性を確保するために剛性が必要です。しかし、柔軟なプラスチックやポリミドフレックスなど、より柔軟な素材では、飛行中に翼が自由にねじれてしまい、モーターによる周期的な制御が効きにくくなります。プラスチックでラミネートされたバルサは、効果的なコントロールのための十分な剛性を提供し、同時にあらかじめ決められた三角形の折り目をつけることができます。
F-SAMは屋外で飛ばすことができますか?また、モーションキャプチャーの環境以外で飛行させるためには、何が必要ですか?
屋外で飛行させることは可能です。受動的に安定しているので、飛行に閉ループ制御は必要ありません。屋内では、モーションキャプチャーの環境から絶対位置を取得し、ステーションホールドフライトやウェイポイントフライトを行うことができます。屋外では、電子コンパスにより相対方位を取得し、基本的なサイクリック制御を行います。現在、屋外での自律飛行のために、GPSを内蔵したプロトタイプを開発中です。
F-SAMにカメラなどのセンサーを追加することは可能でしょうか?
カメラを付けることは可能ですが(過去に実施)、回転しているため、撮影した映像がブレてしまうことがあります。360カメラは軽量化・小型化が進んでいますので、F-SAMなどのモノコプターに搭載してみるのもいいかもしれません。その他のセンサーとしては、LiDARセンサーやToFセンサーを搭載することも考えています。LiDARの場合、プラットフォームがすでに既知の回転数で回っているため、有利になります。従来のLiDARシステムでは、回転運動をさせるために専用のアクチュエータが必要でした。F-SAMは回転するプラットフォームとして、すでに自然な回転のダイナミクスを持っているので、LiDARの統合を軽量かつ効率的にすることができます。
論文には、「将来的には、人の手を介さずにコンテナから直接F-SAMを打ち上げられるようにすることも検討する」とあります。これはどのように実現するのか、説明していただけますか?
現在、F-SAMはコンパクトに折りたたんでコンテナに収納することができます。しかし、それを広げて手で打ち上げるか、床に置いて飛ばすかは、まだ人間の手に委ねられています。将来的には、折りたたんだF-SAMを空中に飛び出させる機構(加圧ガスなど)を持った容器に入れ、弾力性のある素材を使用しているため、すぐに展開を開始できるようにすることを想定しています。モーターで回転させれば、遠心力によって翼がまっすぐになります。
F-SAMは、民生用のドローンとして優れていると思いますか?
F-SAMは良いおもちゃになるかもしれませんが、従来の航空写真やビデオ撮影が目的であれば、クアッドコプターの良い代替品にはならないかもしれません。しかし、GPS誘導による単発の偵察ミッションでは、良い候補になり得ます。飛行に使用するアクチュエーターは1つだけなので、比較的安価に作ることができます。また、飛行中は非常に静かで、着陸後は簡単にカモフラージュすることができます。また、軽量な各種センサーを搭載することで、気候のモニタリングなど、さまざまなミッションに対応することができます。また、F-SAMは自動回転して降下するため、空中から展開することも可能です。
次に取り組んでいることは何ですか?
現在、いくつかのエキサイティングなプロジェクトが進行中ですが、そのほとんどが「より少ないものでより多くのことを行う」というテーマに焦点を当てたものです。つまり、できるだけ少ないアクチュエータで、複数のミッションや飛行モードを実現することを目指しているのです。F-SAMのように、たった1つのアクチュエータで制御可能な飛行を実現するために、私たちはSamara Autorotating Wing(SAW)と名付けた完全自動回転型のプロジェクトに取り組んでいます。このプラットフォームは、今年初めにIEEE Transactions on Roboticsに掲載されましたが、たった1つのアクチュエータで2つの飛行モード(自転と潜水)を実現することができます。このプラットフォームは、単発のセンサーを遠隔地に配備するのに適しています。例えば、森林監視や山火事警報システム用のセンサーを配備するために、このプラットフォームを利用することができます。センサーは樹冠に着陸することができ、着陸後は翼が太陽エネルギーを捕らえるのに必要な面積を提供し、数年にわたる持続的な運用を可能にします。また、上空を飛行していたラジオゾンデを、自動回転するプラットフォームを使って回収地点まで誘導するというシナリオも興味深いです。現在、世界中の気象観測所から多くのラジオゾンデが水素気球で打ち上げられ(オーストラリアだけで年間2万個以上)、気球が高高度に達して破裂するとセンサーは地上に落下し、これらのセンサーを回収するための努力は必要ありません。このセンサーを回収場所に誘導することで、毎年数百万ドルを節約することができ、さらに環境汚染の軽減にもつながります。
学研 大人の科学「カエデドローン」
カエデドローン | 大人の科学.net
2016/12/20
■本体サイズ
250×280×25mm ■連続飛行時間 約7分間
■充電時間 約30分間 ■操作距離 屋内約 5m













.jpeg)
0 件のコメント:
コメントを投稿